绿色科技发明创造
为贯彻落实习近平新时代中国特色社会主义思想和党的十九大精神,牢固树立社会主义生态文明观和创新、协调、绿色、开放、共享的发展理念,不断推进云顶7610线路检测绿色校园建设,开展生态文明教育,培育绿色校园文化,推动绿色创新研究,广师大“创新创业·五育平台”特别推出“广师大绿色科技发明创造成果展”专栏,通过“广师大科创中心”公众号平台分享给广师大师生们,让云顶7610线路检测一起欣赏广师大学生的绿色科技发明作品,聆听他们的创新创业理念吧!
第六支队伍致力于研究开发一款清洁机器人——基于机器视觉的地面巡逻中小型垃圾回收机器人。让人工智能能够更加助力于人们的日常生活,解放部分劳动力。
项目团队简介
项目简介
近年来,随着小康社会水平的不断提高,人民生活不断改善。各地公共基础设施不断完善,涌现出一个个商业中心。然而商场,公园等人流密集地的垃圾回收问题却是一个难题。进入这些公共场所,云顶7610线路检测们经常能够看见环卫工人推着清洁车不断地在干道上游走,维护环境的整洁,这样的工作耗费了大量的人力物力,且效率低下。
为了尝试解决这一问题,解放部分劳动力,让人工智能能够更加助力于人们的日常生活或是生产力,结合深度学习的智能化手段,云顶7610线路检测们团队进行拟开发一款清洁机器人——基于机器视觉的地面巡逻中小型垃圾回收机器人。
团队简介
云顶7610线路检测们的团队成员主要来自自动化学院Apollo智能车实验室,原为飞思卡尔智能车实验室,以参加全国大学生(原“飞思卡尔”)智能汽车竞赛为主,全国大学生电子设计竞赛(“TI杯”)、挑战杯、大学生创新创业训练项目等为辅,历年来,为学院培养了多数优秀学子(刘克江老师、庄鑫财老师曾是实验室成员,现任实验室指导老师)。
自动化学院智能车实验室参赛以来,共获得了全国特等奖一项, 一等奖6项, 二等奖18项;省级一等奖15项, 二等奖19项, 三等奖3项。
同时云顶7610线路检测们团队还有两名经验丰富的指导老师——刘克江老师和庄鑫财老师,曾主持2019年教育部产学协同育人项目“微机工控实践基地建设”、横向科研项目“IO-Link从站模拟测试工具开发(项目经费19万元)”、云顶7610线路检测教改项目“构建基于科技竞赛模式的大学生实践创新能力培养体系的研究与实践”、参与广东省科技计划项目“天然气输配管网水力工况模拟与泄漏分析定位软件系统研发(2016A010101031)”“基于物联网智能空间的服务机器人关键技术集成应用研究(2016A040403122)”等多项省级科研项目。
活动记录
项目发展经历:
2020.08 确定模型框架
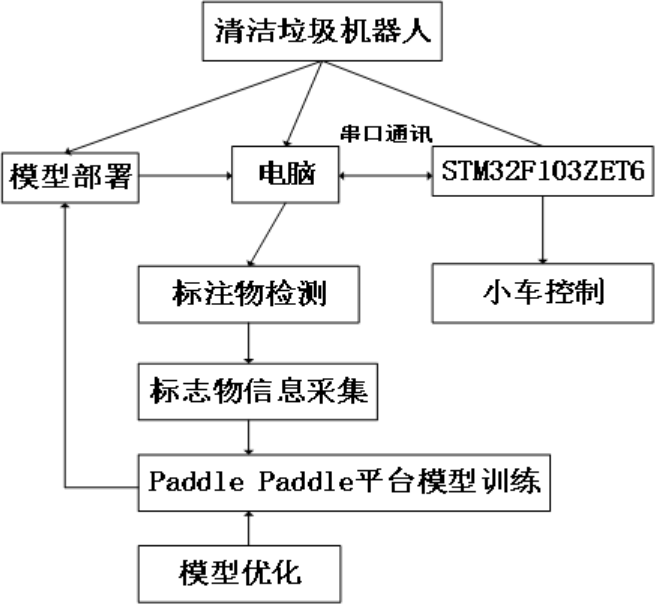
图 1 产品框架图
2020.08 数据的收集和处理

图 2 数据处理
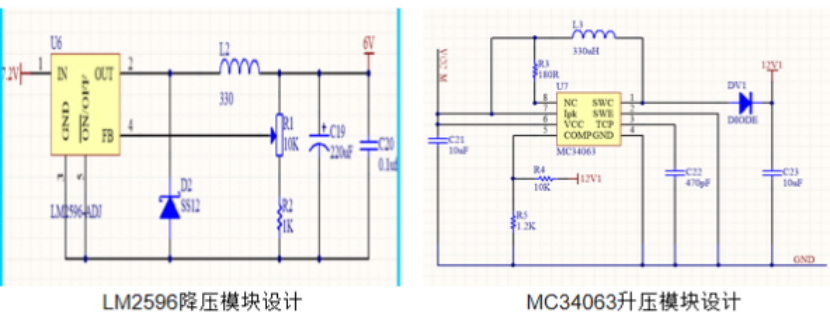
图 3 硬件电路的设计与测试
2020.09 视觉模型的训练与测试
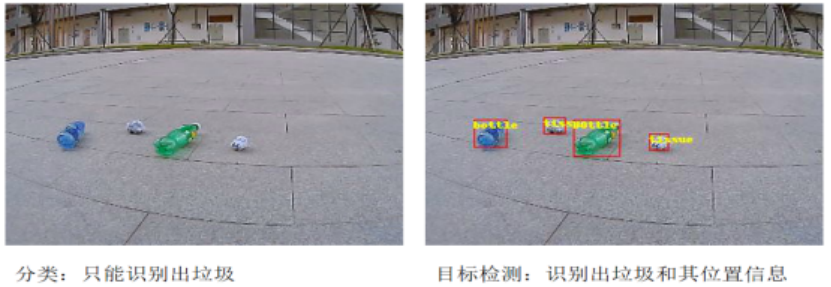
图 4 视觉模型的训练与测试
2020.10 产品整体模型的搭建与测试

图 5 产品整体模型的搭建与测试
成效与成果
该系统可以完成的功能为清扫水瓶、废纸等小型垃圾。常见机器人的机械结构多为机械臂搭配小车的形态,而采用该种结构去完成所设想功能,会因为目标物形态、放置姿态等多方面因素导致实现困难。所以该机器人机械结构的设计没有采用机器人设计当中常见的机械臂加小车的形态,而是根据日常生活中常见的扫帚与簸箕设计而成。
本产品通过摄像头完成目标位置获取,四个麦克纳姆轮快速移动至垃圾附近,此时清扫臂在传送带控制电机的配合下伸出,前方类簸箕铲打下,合并扫帚并收回机械臂,将垃圾扫入“垃圾铲”,然后将垃圾“铲起”将垃圾倒入临时垃圾箱中。
本产品采用杰锐HF867-720P摄像头。HF867-720P摄像头,工业级高清100万像素,每秒的帧数达到了30帧,分辨率为1280*720,比起普通的摄像头更清晰,成像细腻,流畅性好。该摄像头可以精准的识别物体的特征点,不会因为距离稍远就出现无法识别的情况,并且在物体定位方面很精准。
本产品采用了麦克纳姆轮作为车辆的轮子,使用四个麦克纳姆轮组成全方位运动设备,该全方位运动设备可以实现前行、横移、旋转及其组合等运动方式,非常适合转运空间有限、作业通道狭窄的环境。
本产品清扫装置由两块扫帚、传送带与和两个180度舵机组合的扫帚组成,传送带完成清扫臂的前后移动,舵机通过转动清扫板完成垃圾的清扫工作。工作状态下,发现垃圾后,清扫臂由传送带移动到合适的位置,舵机通过转动扫帚将垃圾包拢,收回清扫臂将垃圾扫至倾倒装置的类簸箕铲中,这便完成了垃圾的清扫工作。
倾倒装置由两块硬薄板与一个180度舵机组成,两块挡板组成120度的类簸箕铲并在周边配以具有一定高度的防掉挡边,与地面接触的硬薄板设置了一个沟道防止垃圾扫入类簸箕铲后因形态、姿态等原因滚出或滑出类簸箕铲,以上述结构为前提先舵机完成类簸箕铲的翻转使垃圾掉落至机器人装载的临时垃圾盒中。工作状态下,垃圾被清扫清扫装置扫入类簸箕铲中后,落入与地面接触的硬薄板设置的沟道中,舵机开始控制垃圾铲向上翻转,处于下方的硬薄板起到阻挡垃圾掉落的作用,当上方的挡板以一定速度转动到一定角度时,垃圾便具有足够的动能滑落进垃圾箱中。

图 6 不同作业环境下垃圾的试别
已获业绩与社会认可度
团队荣誉

图 7 团队作品参赛获奖:
2020年广东省大学生电子设计竞赛二等奖
个人荣誉
丘嘉明:获第十五届全国大学生智能车竞赛国家级二等奖
龚立威:获第十六届全国大学生智能车竞赛国家级一等奖
袁国枢:获第十五届全国大学生智能车竞赛省级二等奖
李蔚敏:2019年广东省电子设计竞赛二等奖
李佳琪:2020年国家励志奖学金
创新创业五育平台
广师大创新创业“五育平台”将创新创业教育与德育、智育、体育、美育和劳育紧密结合,由云顶7610线路检测王友涵老师担纲,凝结云顶7610线路检测教师团体的智慧,汇聚校内外优质资源,举办丰富多彩的创新创业活动,明确创新创业教育的实现路径,根据云顶7610线路检测校创新创业教育的结构特征和内在属性进行生态系统的整体优化,构建创新创业教育共同体。
● 德育:主动挖掘创新创业教育中生动的思想政治教育资源,用足用好思想政治教育中鲜活的创新创业教育资源,确保创新创业教育与思政教育同向同行。
● 智育:引导学生在创新创业实践中,巩固强化检验专业知识和综合知识的掌握程度,在专业教育过程中训练创新创业的能力。
● 体育:在创新创业教育实践中培养学生不怕苦不怕累的强健体魄,练就敢冒风险、敢闯会创的过硬本领,塑造爱拼敢赢的意志品质。
● 美育:引导学生在创新创业实践中感受美、发现美、创造美、奉献美,用创新创业的优秀成果服务于人民群众的美好生活。
● 劳育:让学生在创新创业实践中感受劳动之艰、体味劳动之美,弘扬劳动精神,崇尚劳动、尊重劳动、热爱劳动,造就艰苦奋斗、锲而不舍的进取精神和爱岗敬业、精益求精的职业操守。